“`html
يُعدّ يوم الجمعة الروبوتات اختياركم الأسبوعي من مقاطع الفيديو الرائعة حول الروبوتات، مُجمعة من قبل أصدقائكم في قسم الروبوتات بـ مجلة IEEE Spectrum. نُنشر أيضًا تقويمًا أسبوعيًا للأحداث القادمة في مجال الروبوتات خلال الأشهر القليلة المقبلة. يرجى إرسال أحداثكم لتضمينها.
مؤتمر ICRA 2025: 19–23 مايو 2025، أتلانتا، جورجيا
استمتعوا بمقاطع الفيديو اليوم!
“`
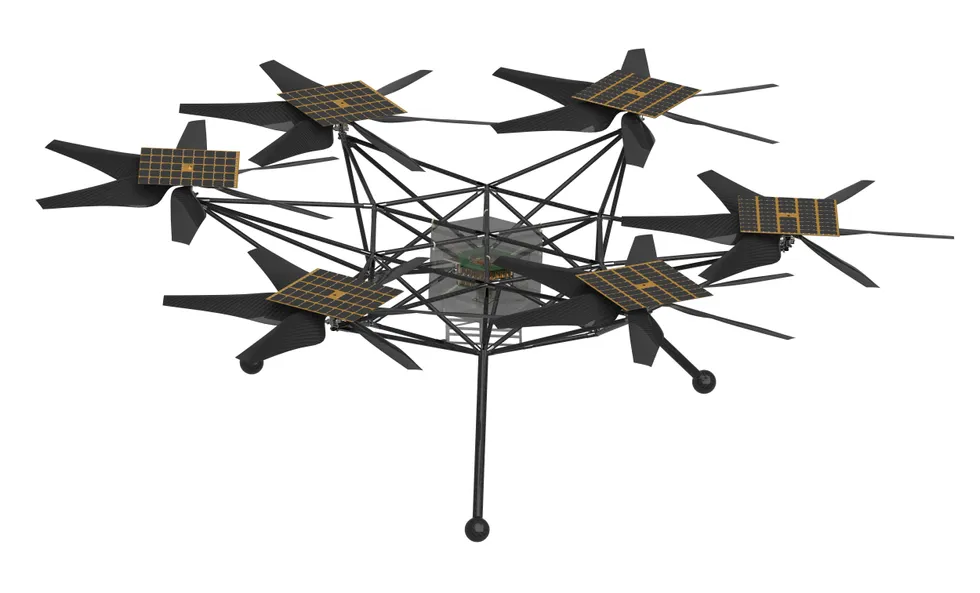
مفهوم مروحية المريخ التابعة لوكالة ناسا، المعروض في عرض تصميمي، هو مُتَطوّرٌ أكثر من مُتَوَجّهٍ مُقترحٍ لمتابعة مروحية المريخ “إنجينيويتي” التابعة للوكالة، والتي وصلت إلى الكوكب الأحمر في بطن روفر بيرسيفيرانس في فبراير 2021. ستكون المروحية بحجم سيارة رياضية متعددة الاستخدامات، بـ ستة روتور، كل منها بستة شفرات. يمكن استخدامها لنقل حمولات علمية تصل إلى 11 رطلاً (5 كيلوغرامات) لمسافات تصل إلى 1.9 ميل (3 كيلومترات) كل يوم مريخي (أو سول). يمكن للعلماء استخدام المروحية لدراسة مساحات واسعة من التضاريس بتفصيلٍ ودقة، بسرعة – بما في ذلك المناطق التي لا يمكن للروفر السفر إليها بأمان.
كتبنا مقالاً عن نسخة مفهومية سابقة من هذا الشيء قبل بضع سنوات إذا كنت ترغب في مزيد من التفاصيل عنه.
[ ناسا ]
أعلنت شركة Sanctuary AI عن أحدث اختراقاتها في مجال التشغيل الهيدروليكي والتحكم الدقيق في الأداء اليدوي، مما يفتح نطاقًا واسعًا من مهام العمل الصناعية ذات القيمة العالية. تتميز الآليات الهيدروليكية بكثافة طاقة أعلى بكثير من المحركات الكهربائية من حيث القوة والسرعة. ابتكرت Sanctuary صمامات مصغرة تعمل بسرعة تزيد 50 مرة وأرخص بنسبة 6 مرات من الصمامات الهيدروليكية المتاحة في السوق. يؤدي هذا النهج المبتكر في التشغيل إلى انخفاض كبير في استهلاك الطاقة، وحياة دورة فائقة، وإمكانية تحكم لا مثيل لها، ويمكن أن يتناسب مع قيود الحجم لليد والساعد البشريين.
[ [[LINK6]]روبوتات ملاذ [[LINK6]] ]
جسم الروبوت 2 هو الروبوت الأكثر تقدماً على الإطلاق، مزود بعمود فقري قطني مُنفّّع وجميع عضلات البطن المقابلة. يرتدي جسم الروبوت 2 جلدًا أبيض شفافًا يحيط بـ 910 ألياف عضلية تحرك 164 درجة من الحرية، ويتضمن 182 مستشعرًا للتحكم في التغذية الراجعة. تستخدم هذه الأجسام التفعيل الرئوي مع صمامات جاهزة للاستخدام، لكنها تصدر صوتًا من إخراج الهواء. يعيد روبوتنا ثنائي القوائم تصميمنا الهيدروليكي مع صمامات سوائل مخصصة لروبوت هادئ. ستأتي الأرجل قريبًا جدًا!
طور مختبر سوزوموري إندو في جامعة العلوم، طوكيو، بدلة سوبرمان مدفوعة بعضلات اصطناعية هيدروليكية.
نُولّد تسلسلات فيديو دقيقة من الناحية الفيزيائية لتدريب سياسة باركور بصرية لروبوت رباعي الأرجل، مزود بكاميرا أحادية RGB بدون مستشعرات عمق. يتعمم الروبوت على مشاهد متنوعة من العالم الحقيقي على الرغم من عدم رؤيته بيانات من العالم الحقيقي من قبل.
[ محاكي سائل ]
اقترح باحثو جامعة سيول الوطنية مصيدة قابلة لتحريك العديد من الأشياء معًا لتحسين كفاءة عمليات التقاط ووضع الأشياء، مستوحاة من استراتيجية الإنسان في التقاط العديد من الأشياء معًا. تُمكن المصيدة من نقل العديد من الأشياء في وقت واحد، ووضعها في المواقع المطلوبة، مما يجعلها مناسبة في البيئات غير المُنظمة.
[ علم الروبوتات ]
نقدم إطار عمل للحركة الرباعية الأرجل مستوحى من الكائنات الحية، يُظهر قدرة استثنائية على التكيّف، وقادر على النشر الفوري في بيئات معقدة واستعادة الاستقرار على أرض غير مستقرة دون استخدام أجهزة استشعار إضافية. من خلال تطويره، نسلط الضوء أيضًا على تعقيد استراتيجيات حركة الحيوانات، مما يدعم بدوره فكرة أن الاكتشافات في مجال ميكانيكا الأحياء وبحوث الروبوتات يمكن أن تدفع التقدم في كلا المجالين معًا.
[ مؤلفو الورقة البحثية من جامعة ليدز و كلية لندن الجامعية ]
شكرًا، تشينغشو!
عيد ميلاد سعيدٍ ستينًا لـ معهد ماساتشوستس للتكنولوجيا – قسم علوم الحاسوب والذكاء الاصطناعي!
[ معهد ماساتشوستس للتكنولوجيا – قسم علوم الحاسوب والذكاء الاصطناعي ]
نعم، يمكن أن يتقدم التقدم البشري بسرعة عندما تُركز عقلك عليه.
[ مختبر السحر ]
يهتم مختبر الروبوتات سونغ في جامعة بنسلفانيا بتطوير أحدث الطرق الحسابية في تصميم وتنفيذ الروبوتات، مع التركيز بشكل خاص على الروبوتات الناعمة والمتوافقة. من خلال الجمع بين الأساليب في الهندسة الحسابية مع تصميم الهندسة العملية، نطور نظريات ونظم لجعل تصميم وتصنيع الروبوتات بديهيًا وسهل الوصول إليه لغير المهندسين.
سأفتح الأبواب من الآن فصاعدًا كما يفعل الروبوت في هذا الفيديو.
تسلقوا منحدراً شديد الانحدار حتى حافة حفرة جيزيرو على المريخ في هذه الصورة البانورامية التي التقطتها مركبة ناسا البستية قبل أيام من وصولها إلى القمة. تُظهر المشهد مدى انحدار بعض المنحدرات المؤدية إلى حافة الحفرة.
[ ناسا ]
وقتنا محدود عندما يتعلق الأمر بتشغيل الطائرات المُسيّرة [[LINK20]]، لكننا لم نتجاوز من قبل الذكاء الاصطناعي بعد.
“`html
[ فريق الخراف السوداء[[LINK21]] ]
دانييل بوتشي من المعهد الإيطالي للتكنولوجيا يناقش iCub و ergoCub كجزء من حلقة نقاش صناعية في مؤتمر الروبوتات البشرية 2024.
[ ergoCub ]
مقالات من موقعك
مقالات ذات صلة حول الويب